We start from the yoke. Aircraft, so we call it, helicopters are called cyclic pitch lever, and is situated between the driver's legs, as many yoke. This joystick is acting up on pot through the servo control, and together with the collective pitch lever, working on the rods exchange step.
Figure 1 - Oscillating plate and drive, connecting rods and compasses antitorcenti exchange step.
(Unfortunately you can not see very well the swash plate fixed to the rotating underneath, you can just replace the picture)
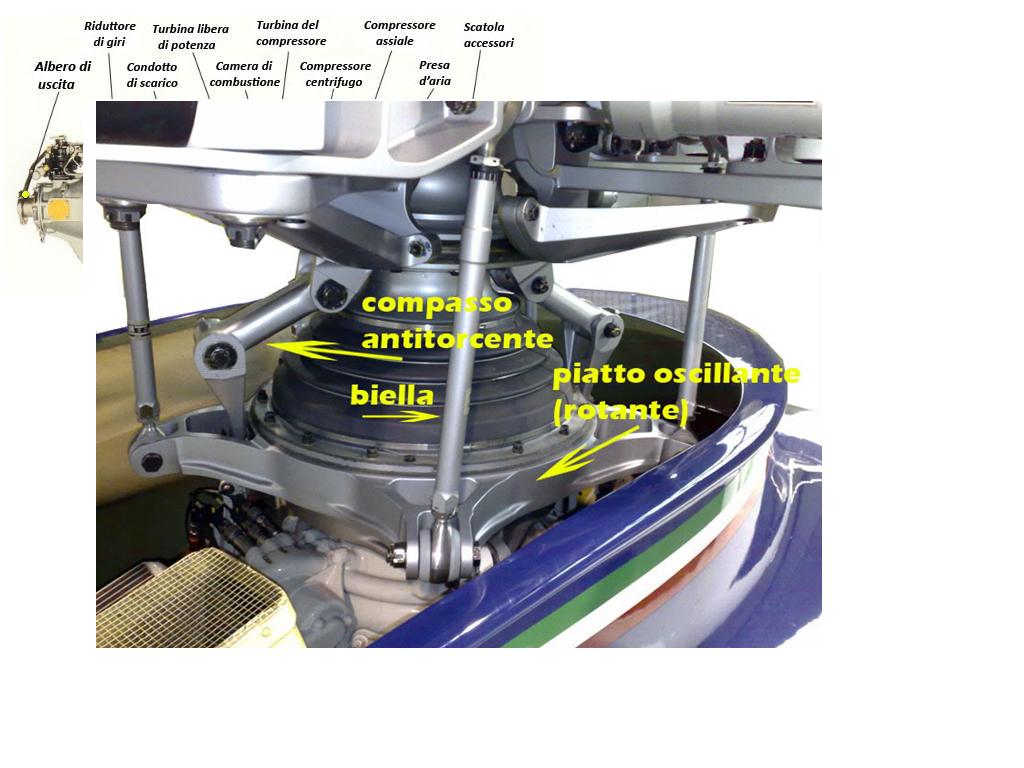
levers (the fly by wire is not yet widely used rotary wing), the command comes to servos that "amplify" the hydraulic mechanical impulse and transmit it to the swashplate, making it tilt. As the top plate (rotating) connected to the lower (usually by double bearings) also will move the connecting rods. Will move in cycles. That is, as the rotor turns, the rod that occurs in the sloping side of the plate will drop by varying the incidence of the blade attached (in this case down). Clear, no? . Bene.C 'is another thing, I will tell you in a very immediate: The blades of a rotor, when they are subjected to a modification of their importance, they act as a gyro-free, and as a result of gyroscopic precession effects (reactions) occur at 90 ° with respect to actions .. look on the internet "gyroscopic precession" and you'll understand what I mean, otherwise we do at night.
Let us return to our flight control. We said that in addition to the cyclic pitch lever is also a lever called the collective pitch., Which is the type handbrake lever that you hold with your left hand. Here the issue is very simple: pulling up the lever all the swash plate (fixed and mobile) salt. So all the blades increase their incidence. As a result, the helicopter gains altitude.
We talked about cyclic and collective, it lacks the foot pedals. Also this is quite simple, if I move the helicopter around its vertical axis (yaw) acts just like on the plane: left foot, yaw left and vice versa. The poor tail rotor slap works under the third law of motion: it is in the air, the body of the helicopter is forced to rotate in the opposite direction of rotation of the pedal rotore.Con different then the collective pitch of rotor blades tail, increasing or decreasing the rotation effect caused by the main rotor induced.
Before talking about the engine, there are other interesting details that I want to introduce. The first concept is that the blades of helicopters are all warped. As the fusilli. Why? Simple: we pretend to slice the blade in multiple sections. We add up the lift in these sections, and we have the total lift of the blade. We know that from the root to the tip of the blade radius aumenta.La angular velocity remains constant (in rad / sec) The peripheral speed will therefore increase in proportion as I get closer to the tip of the blade. Consequently also increase the lift. The result would be a disk rotor lift than outward, and inward to a minimum. In terms of mechanical and kinetic is not the best of life. It would therefore take the twist of the blade: to have a uniform distribution of loads, the blades are warped around their longitudinal axis, in order to have a pitch angle decreasing from the root end. This does not prevent a phenomenon called "angle of taper "as the center of pressure of the blade is about half the blade, and assuming in theory that the center of pressure and center of gravity coincide (almost never the case) it creates a bending moment given by the force (in this case the lift) for the arm (the distance between the axis of the transmission and the center of pressure). 's why you take the hinges flappeggio: in this way the blade can "flappeggiare" without triggering dangerous reaction forces . We introduce another important aspect: the asymmetry of the disk rotore.Questo aspect is very significant in the motion passed. Let me explain: If my helicopter moves forward, we will have half the disk with blades advancing against the wind and half the disk with the blades downwind receding. This difference causes an asymmetry of kinetic portanza.Crediateci or not, is a known problem, which is held as it is. The interesting aspect is that the speed Vne (failed) helicopter will always be associated with this phenomenon: the dissymmetry of lift is very dangerous when you approach the supersonic regime (obviously speaking of the blade): If you travel as well as a risk that some half-speed disc is transonic and supersonic disk half, with disastrous consequences dynamics.